
In brief. In the window below, various Platonic an Archimedean solids with tetrahedral symmetry are continuously deformed into one another. By default, the object is displayed as a wire frame, and is freely rotating in three dimensions as it changes shape. You can pause/restart the rotation, toggle between a wire frame and solid model, as well as pause/continue the deformation of the solid using the buttons above the applet. When the deformation is paused (in vertex motion off mode), you can drag the red crosshair in the left window to manually deform the solid. You can also rotate the solid by dragging the mouse over the solid.
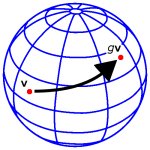
Using the matrix representation given on the tetrahedral symmetry page, we may view the tetrahedral symmetry group as a group of rotations acting on the unit sphere: points on the unit sphere correspond to unit vectors; as rotations preserve length, if v is a unit vector, then gv is also a unit vector for any group element g -- hence a point on the unit sphere. With this point of view, we may consider the orbit of v under the tetrahedral symmetry group; that is, the set of all points of the form gv, where g ranges over all elements of the group:
ev = v, av, bv, abv, b2v, et cetera
(recall that a and b are the generators of the tetrahedral symmetry group). For certain special points, the orbit of v corresponds to the vertices of a Platonic or Archimedean solid; however, for most choices of point v, the orbit will be the vertices of solid that is neither Platonic nor Archimedean. In the above applet, the colored points yield orbits that are the vertices of the Platonic and Archimedean solids stated in the color key.
Note that all solids in the applet are deformations of the icosahedron. In the case of the cuboctahedron and the truncated cube, some adjacent faces of the icosahedron are coplanar; i.e., they fit together to form a non-triangular face. In the case of the cuboctahedron, the square faces are formed from two adjacent triangles; for the truncated tetrahedron, the hexagonal faces are formed from four triangles. Compare these solids in the wire and solid frame modes.
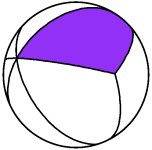
The orbit of a point under the tetrahedral symmetry group action is a finite set of points (usually 12 points, the number of elements in the group, but not always). Similarly, we may consider the orbit of a region on the sphere under the group action; the result will be a collection of, possibly overlapping, copies of that region. There is a special region R on the sphere, called the fundamental region, whose orbit is a tiling of the sphere: the orbit of R covers the whole sphere with no overlap, except along boundaries; i.e., for any group element g, other than the unit, R and gR only intersect on the boundary of R. For the tetrahedral symmetry group, the fundamental region is the purple triangular region in the image on the left.
In the applet at the top of the page, the window on the left depicts the fundamental region, deformed into a square (what can I say, it was easier to program that way).
 |
 |
Any point v on the sphere can be translated back to the fundamental region via the group action; i.e., there exists a rotation in the tetrahedral symmetry group such that gv is in the fundamental region. Thus the vertices of all possible solids generated by the tetrahedral symmetry group action can be obtained by choosing a point within the fundamental region. The significance of dividing the fundamental region into two triangular regions will be discussed later when we introduce the full (achiral) tetrahedral symmetry group.
As hinted on the tetrahedral symmetry page, the tetrahedron actually has more symmetries than those encoded by the tetrahedral symmetry group; however, these other symmetries involve reflections, which reverse orientation. Assuming that one is willing to allow reflectional symmetries, it turns out that there are actually two (and only two) distinct ways to incorporate them. Each is discussed separately in the following two links.
Copyright © 2016 by Jason Hanson and DigiPen Institute of Technology